Index of Matlab Essentials
- Matlab基本语法和数据结构
- Matlab常用绘图函数
- Matlab符号化系统
- Matlab解物理问题的常用算法(本文)
- Matlab具体应用
- 疑难问题和感想
数值微分
离散数据微分的计算方式
- 前差:
𝑓'(x) = (𝑓(𝑥 + h) − 𝑓(𝑥))/h - 后差:
𝑓'(x) = (𝑓(𝑥) − 𝑓(𝑥 - h))/h - 均值:
𝑓'(x) = (𝑓(𝑥 + h) − 𝑓(𝑥 - h))/2h
常用微分运算命令
| 命令 | 描述 |
|---|---|
dX = diff(F [,n [,dim ]]) |
对维度为 dim 的矩阵(向量) X 作 n 阶差分 (仅作差, 需手动点除步长) |
[dX [,dY]] = gradient(F, h) |
当输入 F 为向量(一维)时, 返回 F 的导数 dX当输入 F 为矩阵(二维)时, 返回 F 分别在 x 和 y 方向上的梯度 dX dY 标量 h 定义相邻元素的步长 |
del2(F, h) |
用法同 gradient() 但是返回的是拉普拉斯算符的运算结果 |
Matlab求方程零点
求单调函数实根的算法
1. 对分法(二分查找法)
基于定理:
若单调连续实函数
f(x)满足f(a)*f(b) < 0, a<b则f(x)在(a,b)区间存在实根.
只要找到一组 a, b 使得 f(a)*f(b) < 0, 就可以连续使用二分法迭代 a 和 b 的值, 直到 a-b 足够小(小于设定的下限).
特点: 稳定, 速度较慢
2. 切线法(牛顿迭代法)
基于 Taylor Series:
当 x -> xn 时, f(x) ~ f(xn) + f’(xn) * (x - xn)
因此, 对于一组 a, b 使得 f(a)*f(b) < 0 , 可以用上述 一阶泰勒展开函数的零点 代替二分法作为迭代的基准点.
特点: 速度较快, 但是对于不同初始条件, 其行为难以预测
3. 弦割法
将对分法直接求中点改为考虑 f(a), f(b) 作为权重的加权平均.
特点: 方法 1 的改进版
4. 迭代法
将函数写成零点方程, 并化成 x = f(x) 的形式, 产生迭代公式: x_k+1 = =f(x_k).
这种方法需要手工验证迭代公式在零点附近收敛, 并且需要针对每一个不同的函数表达式手工转换, 因此不常用.
求单调函数实根的命令
| 命令 | 特点 |
|---|---|
fzero() |
解 非刚性 问题 |
roots() |
只适用于多项式求根, 可以求出所有根, 包括虚根 |
fsolve() |
适用于任意自定义函数, 需要自定义试探点集, 返回的根数量不多于输入的试探点数量 |
fzero()
x = fzero(F, x0); x = fzero(F, x0, options, p1, p2, ...); [x, fval] = fzero(...);
fzero() 的输入变量 F 必须是单变量函数的句柄,
x0可以是标量(scalar), 表示开始搜索的 x 值; 也可以是 1*2 的向量(vector), 表示进行搜索的范围.
注意: fzero 只返回它找到的第一个零点, 对于多零点函数, 无法找到给定范围内的全部根.
roots()
x = fzero(C); % For example: % C = [a,b,c,d,e,f] % means equation: % a*x^5 + b*x^4 + c*x^3 + d*x^2 + e*x + f = 0
输入变量 C 是一个 1*n 向量, 其中的元素代表多项式方程各幂次项系数, 由高次项到低次项排列.
输出 x 是一个向量, 包含方程的所有根(包括虚根).
fsolve()
[X,FVAL] = fsolve(FUN, X0, ...); % FUN is a customed 1 input function, % X0 is a vector of all strat points % X contains all possible solutions, % if fsolve fails to find a solution from X0(a), % X(a) will be same as X0(a)
R-K法解微分方程初值问题
R-K方法即 Runge-Kutta Methods ( 龙格—库塔法 ) .
R-K法是一种改进的离散化数值积分算法
由于计算机系统是离散系统, 无法做到绝对的连续积分, 因此必须采用离散化的递推关系式进行数值积分运算. 在离散化运算中, 时间(
t轴)以及空间(y轴)的不连续性会导致量化误差, 这种误差可能会随积分运算进行累积(在比较好的情况下, 也有可能相互抵消), 对积分结果造成不可接受的误差.
数值求解微分方程最基本的方法是 Euler迭代法:
已知
dy/dt = f(t,y), F(t0) = y0, 数值化(离散化)步长设为h则
Euler迭代法的递推式为 yi+1 = yi + hf(ti, yi)使用上述递推式可以一定程度地求出微分方程的数值解.
R-K法是一种改进的, 根据初始条件在一定范围内数值求解微分方程的方法.
R-K法的思想就是通过预测下一步的落点, 计算两步之间 n 个点的 加权 平均斜率, 取代原先粗糙的斜率预测值, 从而减小步长范围内 f(t,y) 的变化导致的离散化误差.
N 阶R-K法的加权平均需要用到 N 个系数, 这些系数可以手工选取, 应当保证归一化(和为一).
变步长R-K法 - 兼顾精度和速度
定义 当前步长误差 为 E0 = y(Euler) - y(R-K,h) , 减半步长误差 为 E1 = y(R-K,h) - y(R-K,h/2).
通过比较 E0 和 E1 的差异(例如,数量级差 1 )来决定是否减半步长. 如果减半步长后和下一级误差相比仍不满足条件, 就继续减半步长, 直到满足条件为止.
这种方法可以保证每一步的误差总是处在可以接受的范围之内, 同时一定程度上保证了解微分方程的效率.
这种逻辑建立在假设
误差随步长的减小单调递减之上, 但这一假设成立的条件待推导.
ode函数集解初值问题或事件问题
初值问题是指在给定微分方程和初始条件的情况下求解原函数的问题.
事件问题是指在给定微分方程和初始条件的情况下求指定的状态何时何地出现的问题
| 函数 | 特点 | 算法和适用性 |
|---|---|---|
ode45() |
解 非刚性 问题精度中等 |
使用龙格—库塔法的四、五阶算法 适用于 大多数场景 |
ode23() |
解 非刚性 问题精度低 |
使用龙格—库塔法的二、三阶算法 适用于 容差较大或适度刚性问题 |
ode113() |
解 非刚性 问题精度由低到高 |
使用Adams-Bashforth-Moulton PECE法 适用于容差要求严格,或者常微分方程函数计算代价较大的情况 |
ode15s() |
解 刚性 问题精度由低到中等 |
使用可变阶次的数值微分(NDFs)算法 适用于ode45计算很慢(由于刚性)或有质量矩阵的情况 |
ode23s() |
解 刚性 问题精度低 |
使用修正的RosenRock算法 适用于对误差要求不高的情况或者有质量矩阵的情况 |
ode23t() |
解 刚性 问题精度低 |
使用自由内插法的梯形法则 适用于要求结果无数值衰减的适度刚性问题 |
ode23tb() |
解 刚性 问题精度低 |
使用TR-BDF2算法 适用于于对误差要求不高的刚性问题或者含有质量矩阵情况 |
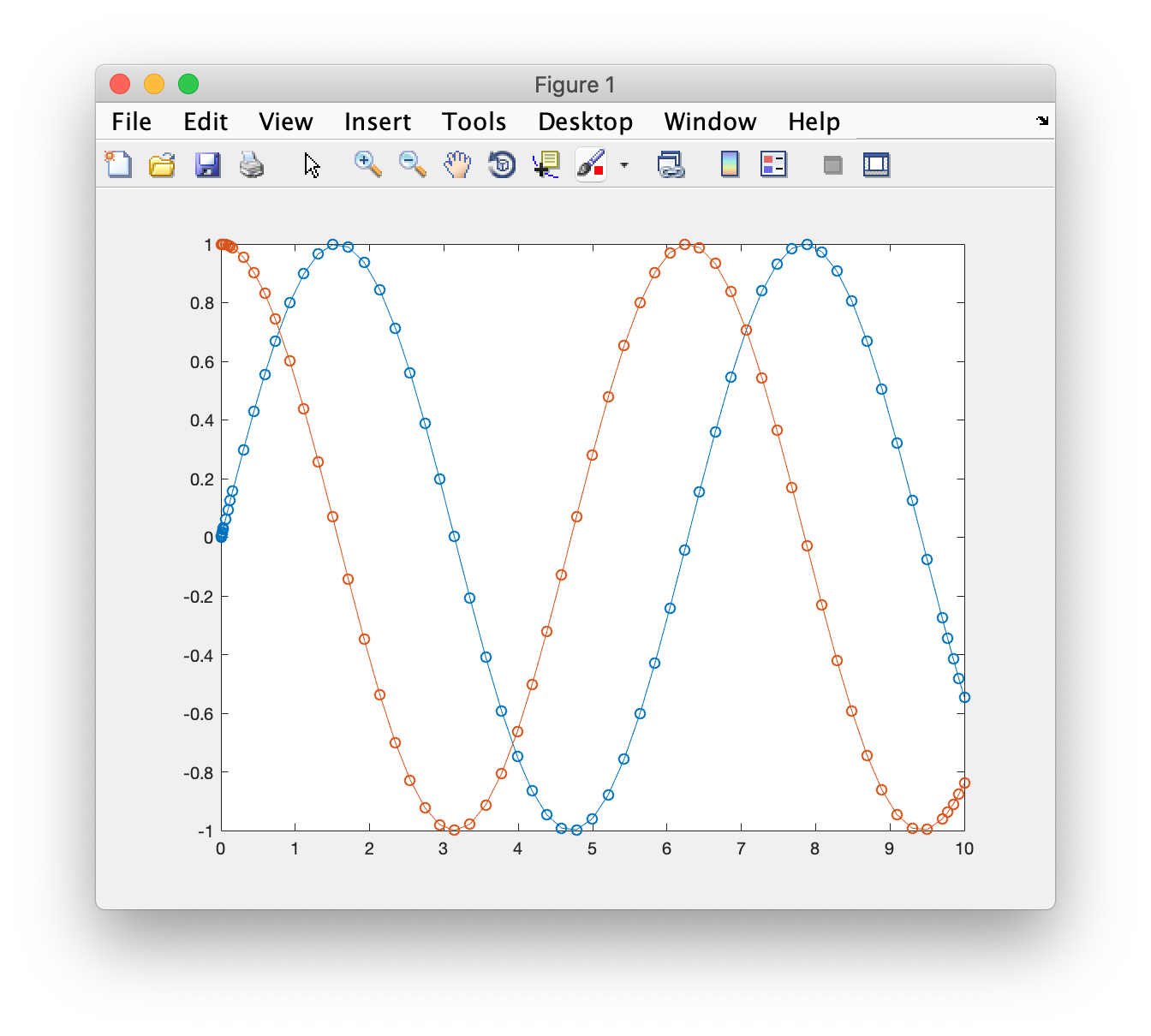
ode函数解初值问题的用法, 以ode45()为例% USAGE TSPAN = [T0 TFINAL]; [TOUT,YOUT] = ode45(ODEFUN,TSPAN,Y0); [TOUT,YOUT] = ode45(ODEFUN,TSPAN,Y0,OPTIONS); SOL = ode45(ODEFUN,[T0 TFINAL],Y0...); % Working Example - sin() function solution >> F=@(t,y)[y(2); -y(1)]; >> ode45(F, [0, 10], [0, 1]);
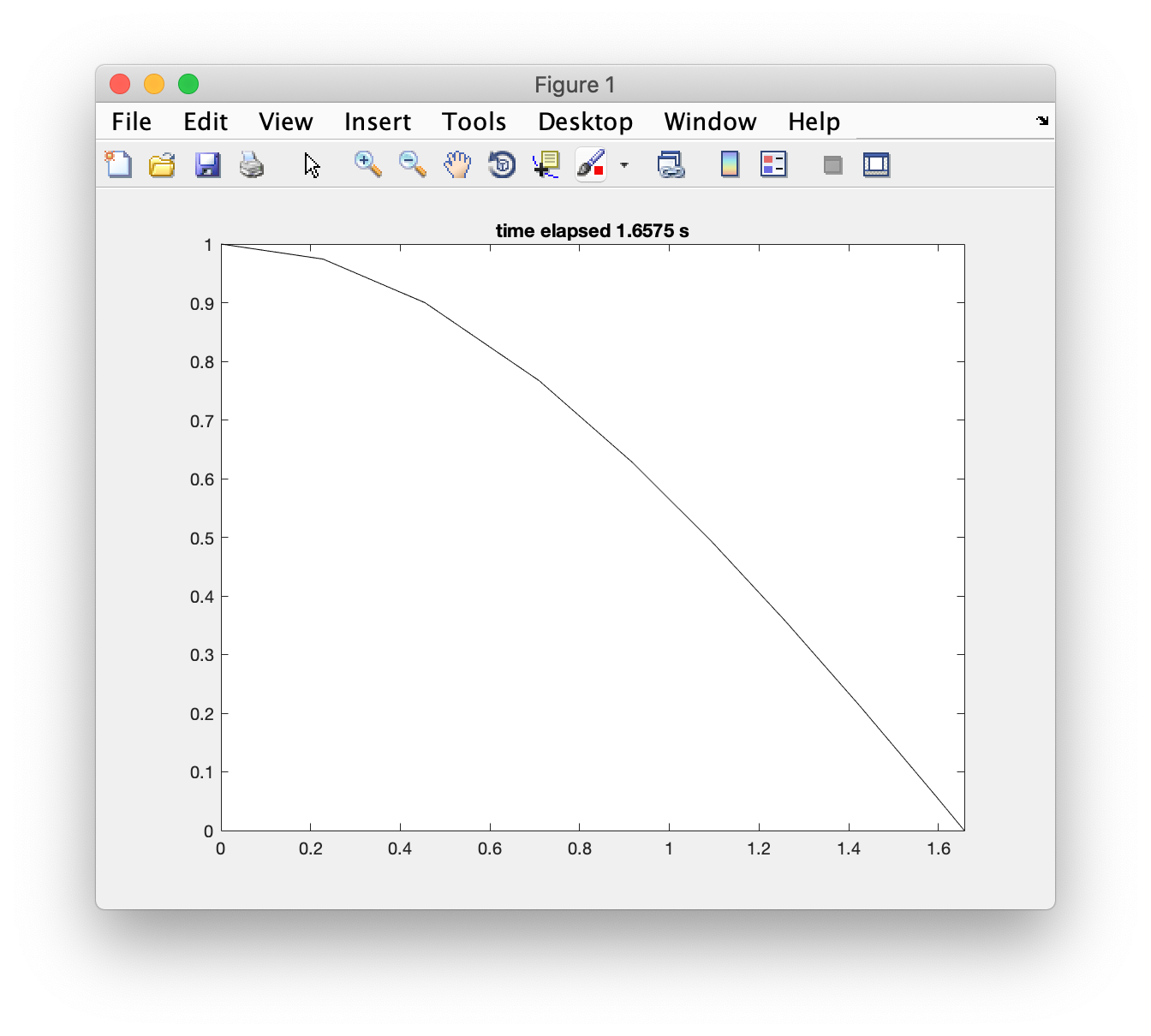
ode函数解事件问题的解法, 以ode45()为例本例中物理模型为一个下落的物体(考虑空气阻力,
F = ma ~ v^2), 中止事件为物体触地.微分方程为
y" = -1 + y'^2即
f=@(t,y)[y(2); -1+y(2)^2];% USAGE % OPTIONS.EVENTS Controls the termination of the intergration. % set it by calling odeset('event',handle) [TOUT,YOUT] = ode45(ODEFUN,TSPAN,Y0,OPTIONS); SOL = ode45(ODEFUN,[T0 TFINAL],Y0...); % Working Example - sin() function solution f=@(t,y)[y(2); -1+y(2)^2]; opts=odeset('events',@trigger,'RelTol',1.e-6); %设置触发事件和精度 handles = ode45(f, [0,Inf], [1; 0], opts); plot(handles.x,handles.y(1,:),'*-k'); title("time elapsed "+handles.xe+" s"); axis([0 handles.xe 0 1]); function [gstop,isterminal, direction]=trigger(t,y) gstop = y(1); isterminal = 1; direction = -1; end
刚性问题
刚性, 指Jacobian矩阵的特征值相差十分悬殊. 也可以定义为函数在某一点附近剧烈变化, 但是在其它位置比较平缓的问题.
边值问题
边值问题可以通过转化为初值问题求解:
-
在任一边界上猜测一个边界条件(边界点的导数), 按初值问题解方程
-
若所得解不满足另一端的边界条件:
- 重新猜测一个边界条件重新解方程(
打靶法) - 或对所得的解加以某些修正(
修正法)
- 重新猜测一个边界条件重新解方程(
pdetools
迭代法解线性方程组
将多项式写成 xk = a1x1 + a2x2 + a3x3 + … 的迭代多项式形式, 给向量 X = [x1,x1,…] 赋随机初值, 并令其按上述迭代关系演化, 在足够长的演化次数后即可得到线性方程组的近似精确解.
这一方法与矩阵的左除类似, 但具有独特的优点.